


এর কার্যনীতিপ্ল্যানেটারি রোলার স্ক্রুহল: ম্যাচিং মোটর স্ক্রুটিকে ঘোরানোর জন্য চালিত করে এবং মেশিং রোলারগুলির মাধ্যমে, মোটরের ঘূর্ণন গতি বাদামের রৈখিক পারস্পরিক গতিতে রূপান্তরিত হয়। প্ল্যানেটারি রোলার স্ক্রু সর্পিল গতি এবং গ্রহের গতিকে একত্রিত করে, যা উচ্চতর কর্মক্ষমতা প্রয়োজনীয়তা সহ ব্যাপক পরিস্থিতির জন্য খুবই উপযুক্ত।
চিত্রে প্ল্যানেটারি রোলার স্ক্রুটি দেখানো হয়েছে। এর প্রধান উপাদানগুলি হল:
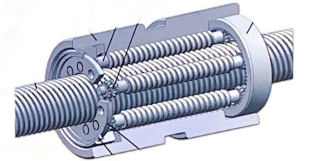
স্ক্রু, এর থ্রেড প্রোফাইলটি একটি সমকোণী ত্রিভুজ (3 টি মাথা এবং তার উপরে থ্রেড)
বাদাম, এর অভ্যন্তরীণ থ্রেড প্রোফাইল স্ক্রুর মতোই।
বেলন, একক-স্টার্ট থ্রেড, প্রতিটি রোলারের শেষে একটি নলাকার পিভট এবং ব্যাফেলের গোলাকার গর্তে একটি গিয়ার পিভট ইনস্টল করা থাকে যাতে রোলারগুলি রেডিয়াল দিকে সমানভাবে বিতরণ করা হয়। গিয়ার দাঁতগুলি অভ্যন্তরীণ রিং গিয়ারের সাথে মেশানো হয়, যা রোলারটিকে মসৃণভাবে সামনের দিকে চলতে দেয়।
Rইটেনিং রিং,বাফলটি লক করা।
ফ্ল্যাট চাবিচালিত বস্তুগুলিকে সংযুক্ত করতে ব্যবহৃত হয়। এর একটি সহজ গঠন রয়েছে, এটি বিচ্ছিন্ন করা এবং একত্রিত করা সহজ এবং এর ভাল হেজিং বৈশিষ্ট্য রয়েছে। এটি উচ্চ গতি, পরিবর্তনশীল লোড এবং প্রভাব পরিস্থিতির জন্য উপযুক্ত।
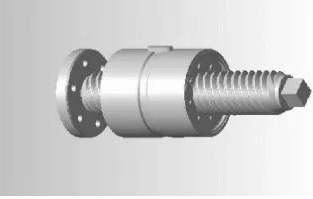
রিভার্স প্ল্যানেটারি রোলার স্ক্রু, যা রিভার্স রোলার স্ক্রু এবং রিভার্স প্ল্যানেটারি রোলার স্ক্রু নামেও পরিচিত, একটি রৈখিক ট্রান্সমিশন ডিভাইসকে বোঝায় যেখানে রোলার বিন্যাস বা চলাচলের দিক একটি প্রচলিত প্ল্যানেটারি রোলার স্ক্রুর বিপরীত।
রিভার্স প্ল্যানেটারি রোলার স্ক্রুটির আকার ছোট এবং লোড বেশি। ফ্রেমবিহীন মোটর ব্যবহার করে, এটি হিউম্যানয়েড রোবটের বাহু, পা, নিতম্বের জয়েন্ট ইত্যাদির জন্য ব্যবহার করা যেতে পারে।
স্ট্যান্ডার্ড প্ল্যানেটারি রোলার স্ক্রুগুলির সুবিধা হল উচ্চ গতি, শক্তিশালী লোড-ভারবহন ক্ষমতা এবং উচ্চ নির্ভুলতা। কার্যকর স্ট্রোক এক মিটারেরও বেশি পৌঁছাতে পারে, যা এগুলিকে অত্যন্ত ভারী লোড পরিবেশের জন্য খুব উপযুক্ত করে তোলে।
স্ক্রু নতুন রিলিজ পয়েন্টের জন্য হিউম্যানয়েড রোবট। ট্র্যাপিজয়েডাল স্ক্রু এবংবল স্ক্রুযান্ত্রিক মেশিন টুলের ক্ষেত্রে পরিপক্ক প্রয়োগ হয়েছে, প্ল্যানেটারি রোলার স্ক্রু বর্তমানে কেবল বিমান এবং অন্যান্য উচ্চ-সম্পন্ন অ্যাপ্লিকেশনগুলিতে রয়েছে। টেসলা হিউম্যানয়েড মেশিন 14 লিনিয়ার কী 8-10 রোলার স্ক্রু ব্যবহার করবে।
পোস্টের সময়: ডিসেম্বর-০৬-২০২৪




